

42HS48 / Nema 17 шаговый электродвигатель BYGH 1.7A CE ROSH CNC 3d printer
- Крутящий Момент: 4.9N.cm
- Производитель: EKP
- Тип: Гибридный
- Фаза: 2
- Ток / Фаза: 1.7A
- Напряжение: 12В
- Сертификация: CE,RoHS
- Угол Шага (градусы): 1.8 degree, 200 шагов 1 оборот
- Размер модели: EKP42HS48-17S4
- Certification: CE,ROHS
- Is customized: Yes
Общая спецификация:
Шаг угла точность: +-5% (полная шаг, не нагрузки)
Сопротивление точность: +-10%
Индуктивность точность: +-20%
Повышение температуры: 80deg Макс (номинальный ток, 2 фаза)
Температура окружающей среды ----------- 20deg до + 50deg
Сопротивление изоляции: 100m?, 500VDC
Insultion -------- 500VAC в одну минуту
Datasheet (EKP42HS48-17S4, 1.7a, (70 OZ или 4.9N.cm или 0.49N.m или 5Kg. см) удерживающий момент, 5 мм диаметр вала):
Зеленый: A-
Красный: B +
Синий: B-
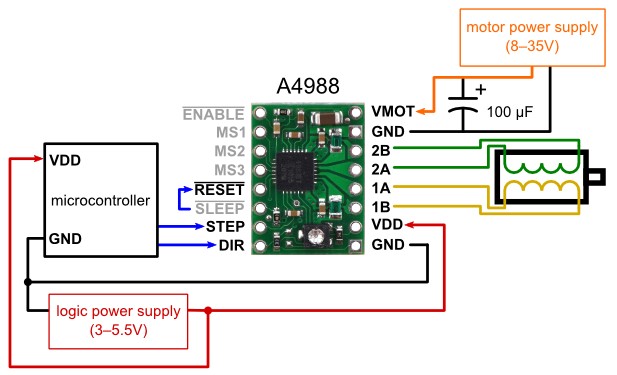
Подключение Nema 17 через A4988
Скетчи для управления шаговым двигателем
Простой Arduino-код для проверки шагового двигателя
//простое подключение A4988
//пины reset и sleep соединены вместе
//подключите VDD к пину 3.3 В или 5 В на Arduino
//подключите GND к Arduino GND (GND рядом с VDD)
//подключите 1A и 1B к 1 катушке шагового двигателя
//подключите 2A и 2B к 2 катушке шагового двигателя
//подключите VMOT к источнику питания (9В источник питания + term)
//подключите GRD к источнику питания (9В источник питания - term)
int stp = 13; //подключите 13 пин к step
int dir = 12; //подключите 12 пин к dir
int a = 0;
void setup()
{
pinMode(stp, OUTPUT);
pinMode(dir, OUTPUT);
}
void loop()
{
if (a < 200) // вращение на 200 шагов в направлении 1
{
a++;
digitalWrite(stp, HIGH);
delay(10);
digitalWrite(stp, LOW);
delay(10);
}
else { digitalWrite(dir, HIGH);
a++;
digitalWrite(stp, HIGH);
delay(10);
digitalWrite(stp, LOW);
delay(10);
if (a>400) // вращение на 200 шагов в направлении 2
{
a = 0;
digitalWrite(dir, LOW);
}
}
}
Второй код для Arduino для обеспечения плавного вращения двигателя. Используется библиотека AcclStepper library.
#include
AccelStepper Stepper1(1,13,12); //использует пин 12 и 13 для dir и step, 1 - режим "external driver" (A4988)
int dir = 1; //используется для смены направления
void setup() {
Stepper1.setMaxSpeed(3000); //устанавливаем максимальную скорость вращения ротора двигателя (шагов/секунду)
Stepper1.setAcceleration(13000); //устанавливаем ускорение (шагов/секунду^2)
}
void loop() {
if(Stepper1.distanceToGo()==0){ //проверка, отработал ли двигатель предыдущее движение
Stepper1.move(1600*dir); //устанавливает следующее перемещение на 1600 шагов (если dir равен -1 будет перемещаться -1600 -> противоположное направление)
dir = dir*(-1); //отрицательное значение dir, благодаря чему реализуется вращение в противоположном направлении
delay(1000); //задержка на 1 секунду
}
Stepper1.run(); //запуск шагового двигателя. Эта строка повторяется вновь и вновь для непрерывного вращения двигателя
| Nema 17 (даташит) | Скачать |
Посмотрите ещё модели из этой же категории








Вход


![]()

![]()
Москва +7 (499) 781-18-69
Волгоград +7 (8442) 93-00-11
Max TG WhatsApp +79275104327
e-mail : info@vce-o-printere.ru
Счетчик Mail Рамблер